
Dr Jekan Thanga – Designing Spacecraft to Explore Extreme Environments Within the Solar System
In the next few decades, upcoming technological advances will offer unprecedented opportunities to explore the solar system – both with autonomous robots, and through manned missions. Dr Jekan Thanga and the Space and Terrestrial Robotic Exploration (SpaceTREx) Laboratory at University of Arizona are at the forefront of efforts to design miniature spacecraft that will allow us to reach these distant worlds, and navigate their rugged, unfamiliar terrains. In the future, his team’s research could pave the way for the establishment of long-term, off-world human settlements, and the discovery of life in extreme, yet potentially habitable environments.
Searching for Life
From the hottest deserts to the deepest oceans, life on Earth has evolved the ability to not only survive, but even thrive in many of the harshest environments. Given these capabilities, some biologists and planetary scientists are exploring the possibility for life to emerge in the extreme pressures, temperatures, and chemical compositions found throughout the solar system.
While the hunt for extraterrestrial life has so far been dominated by explorations of benign regions on the surface of Mars, these researchers propose that the search could be more fruitful if we were to look in places that may at first glance appear far less hospitable – including the rugged surfaces of asteroids, comets, moons and Mars.
Dr Jekan Thanga at University of Arizona focuses on designing spacecraft that are capable of searching for life in these inhospitable places. Where missions so far have used orbiting satellites and wheeled rovers with increasing size and complexity, these craft aren’t well suited to probing rugged environments including cliffs, caves and canyons, where the last refuge of life may have held out in planetary environments like Mars. Through his research, Dr Thanga proposes cutting-edge new solutions to these challenges.
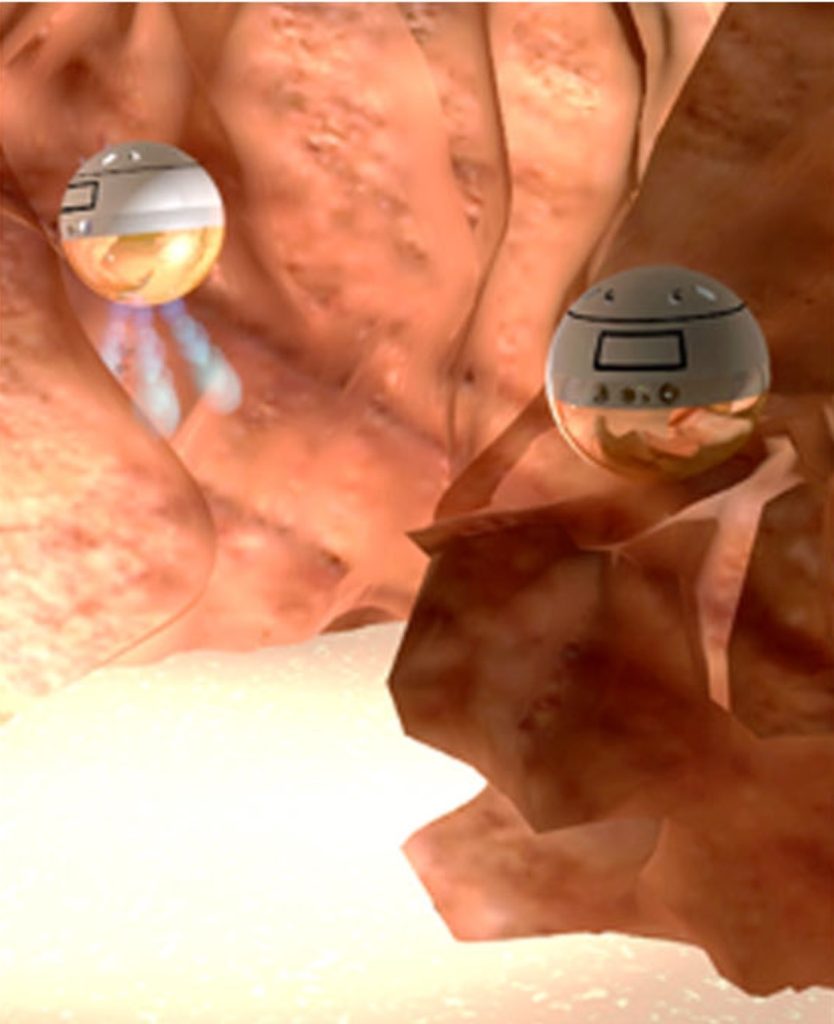
Artistic representation of SphereX robots cooperatively exploring canyons on Mars.
Hopping and Rolling
Through observations of the Martian and lunar surfaces by orbiting spacecraft, planetary scientists have recently discovered evidence of empty voids existing beneath the surfaces of these worlds. Crucially, these spaces are naturally shielded from micro-meteorites, damaging solar and cosmic radiation, and extreme temperature changes. As a result, they could one day prove to be invaluable for use as habitable bases in future manned space missions. On Mars these features may have provided the last refuge of extraterrestrial life – creating a strong incentive for scientists to explore them in more detail.
So far, rough and unfamiliar terrains have meant that underground voids have remained out of reach to current generations of planetary rovers. Recently, however, rapid advances in electronics, sensors, actuators and power sources are leading to ever-smaller devices and instruments – which can be housed in increasingly space-efficient platforms.
By exploiting these advances, Dr Thanga’s team proposes the use of small robots that can hop and roll over rough terrains in low gravity, and be deployed from larger, less manoeuvrable rovers. By efficiently navigating unfamiliar landscapes, these devices could finally allow planetary scientists to access subsurface voids on both Mars and the moon, and report on the conditions inside.
Developing SphereX
In 2014, Dr Thanga and his colleagues first introduced SphereX – a spherical robot that uses hopping and rolling motions to move across rugged terrains in low gravity. Weighing just a few kilograms, the robot is inexpensive, and can be readily manufactured using commercially available components. Furthermore, SphereX can generate motions with just a single thruster, which can freely rotate about all three axes.
In the team’s initial designs, SphereX was powered by ‘PEM’ fuel cells – which can efficiently produce power at low temperatures and pressures. When required, the device expels hydrogen and oxygen gas from its thruster – generated on demand through a reaction between lithium hydride and water, in the presence of a catalyst. Crucially, these measures avoid the need to store hydrogen and oxygen in liquid forms at cryogenic temperatures.
Adding to these advanced capabilities, SphereX contains an advanced thermal control system, featuring a combination of several layers that absorb, emit and insulate against heat to varying degrees, allowing the device to operate effectively across extreme temperature ranges. Finally, the robot incorporates an advanced communications system, allowing it to keep in close contact with the landing rover it is deployed from – which itself can then relay any useful information back to Earth.
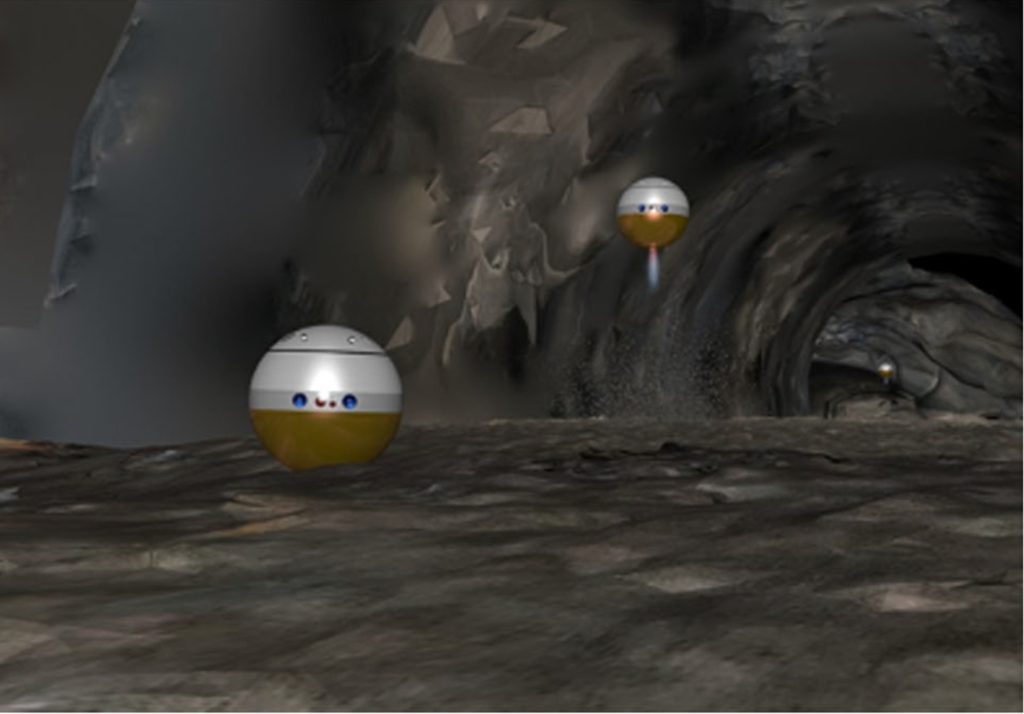
Illustration of SphereX robots in an underground pit on the Moon.
Mapping Out Lava Tubes
Although the origins of subsurface voids on Mars and the moon aren’t yet entirely understood by scientists, many are thought to be remnants of features named ‘lava tubes’, which first formed in the distant past. Typically, these tunnels develop when fast-moving flows of lava form a hard outer crust – which then thickens, and eventually forms a solid roof above the flowing stream. As volcanic activity dies down, the process eventually leaves behind empty underground channels, which can extend for large distances, and can join together to form intricate networks.
To investigate lava tubes, exploratory spacecraft would need to survive on their own for long periods of time, but the earliest designs of SphereX were not well suited for this task. In a subsequent study, Dr Thanga’s team presented an updated mechanical hopping mechanism, which eliminated the need to store the chemicals required for propulsion.
In addition, the researchers proposed how teams of robots, deployed from a single surface rover, could communicate by sending and receiving high-power laser beams. This would enable them to work collaboratively to map out and navigate networks of lava tubes, transmitting any useful data back to the central rover. In addition, the SphereX devices could receive power from the lasers by absorbing their light in photovoltaic panels – allowing them to survive underground for long periods of time.
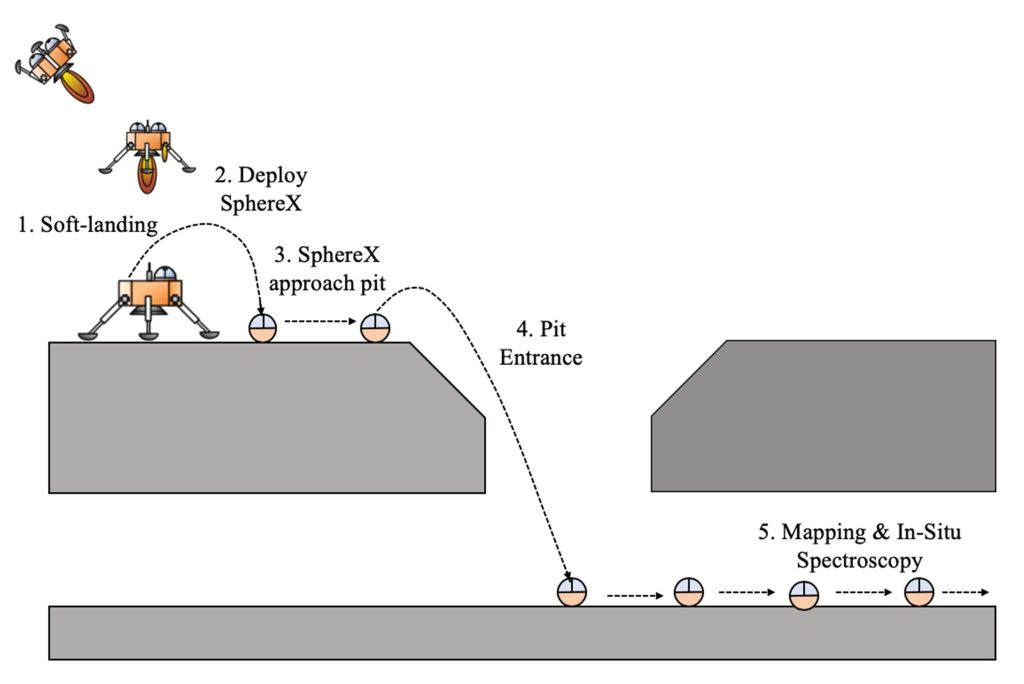
Operation for exploring Lunar pits using a mother-daughter architecture.
Inspiration from Darwin
With such a wide range of advanced features, SphereX would not be limited to exploring subsurface voids on Mars and the moon. Leading on from their initial work, Dr Thanga and his PhD candidate Himangshu Kalita next investigated how their design could be adapted to study a wide variety of other features, including the canyons, cliffs, and crater rims of asteroids, comets, and icy moons.
In this study, the team’s efforts were based around ‘Automated Multidisciplinary Design and Control Optimization’ (AMDCO) techniques. This approach is often used to design systems for optimal mass, volume, power and control, which can vary widely depending on specific mission scenarios. Although AMDCO techniques are deeply complex to implement, the researchers effectively utilised them using specialised machine-learning algorithms, inspired by the process of natural selection.
After assessing the performance of a design, these ‘genetic’ algorithms will determine whether any slightly altered, or ‘mutated’ designs offer an improved performance. If so, a new ‘generation’ of designs is created, and this process is repeated until the highest-performing design is reached. This approach allowed Dr Thanga’s team to efficiently search the entire range of possible SphereX designs for optimised mobility, power, heat regulation, shielding and communication capabilities, based on the requirements of highly specific exploration tasks.
Asteroid Gravities in Earth’s Orbit
Before sending spacecraft to explore distant regions of the solar system, it is first essential to test their performance in the same conditions they will likely face during their missions. For asteroids, these conditions are characterised by a surface gravity of a mere one-thousandth the strength of the Earth’s – giving rise to unique geological textures and landforms.
To recreate this microgravity closer to home, Dr Thanga and his collaborator Dr Erik Asphaug, together with their respective teams, have developed a ‘CubeSat centrifuge’ named AOSAT+. Featuring a state-of-the-art science lab, the device is no larger than a pair of cornflake boxes, and completes a full rotation once every minute. The resulting centrifugal force gently pushes on any material inside the lab – mimicking the surface gravity of a kilometre-sized asteroid.
Using AOSAT+, the researchers hope to study the behaviour of patches of artificial regolith: the ‘soil’ of loose dust and broken rock that covers the surfaces of many asteroids, moons and rocky planets. By studying how the material piles up under microgravity when released from a trapdoor in the AOSAT+ science lab, they could gain key insights into how these far-off environments can best be explored by instruments such as SphereX.

Pareto optimal design solutions of SphereX obtained using AMDCO method
New Possibilities for Exploration
In the near future, Dr Asphaug, Dr Thanga and their colleagues now hope to send AOSAT+ into low-Earth orbit, where the mechanics of freefall allow scientists to easily recreate a zero-gravity environment. In the future, the researchers will aspire towards the design of a low-gravity centrifuge, featuring a science lab large enough to house entire spacecraft, landing rovers and astronauts. If achieved, this spacecraft will allow planetary scientists to simulate diverse surface environments, physical and chemical processes, and the geological structures of planets, moons, asteroids and comets, without having visit them.
With new ways to access extreme environments with unfamiliar gravity, pressure and temperature conditions, researchers could finally answer fundamental questions about the origins and evolution of the solar system, the conditions required to sustain life, and the ability for off-world human settlements to gather the resources they need to survive in the long term. All the while, the technology could provide astronauts and mission operators with the experience they need to carry out dangerous large-scale operations.
Over the next 35 years, space organisations around the world are aspiring to send both human and robot explorers to every corner of the solar system. While immense technological advances will be needed before such missions can be attempted, the work that the team has put into designing SphereX and AOSAT+ will pave the way for spacecraft that could finally transport us to distant worlds; and allow us to finally the answer the ever-present question of whether extraterrestrial life is really out there.
SHARE
{kind=link}
DOWNLOAD E-BOOK

LISTEN TO THE AUDIO
REFERENCE
https://doi.org/10.33548/SCIENTIA804
MEET THE RESEARCHER
Dr Jekan Thangavelautham
Aerospace and Mechanical Engineering Department
University of Arizona
Tucson, AZ
USA
Dr Jekan Thanga completed his PhD in Space Robotics at the University of Toronto in 2008, and then worked as a Postdoctoral Fellow in the mechanical engineering department at MIT, within the field of robotics. He joined University of Arizona in 2013, where he is currently an Assistant Professor of Aerospace and Mechanical Engineering. Here, Dr Thanga is the head of both the Space and Terrestrial Robotic Exploration (SpaceTREx) Laboratory, and the Asteroid Science, Technology and Exploration Research Organized by Inclusive eDucation Systems (ASTEROIDS) Laboratory, which is supported by NASA. Dr Thanga’s broader research interests lie in spacecraft and in-orbit centrifuges, collaborative robot swarms, and sensor networks for measurements in the field.
CONTACT
E: jekan@arizona.edu
W: https://profiles.arizona.edu/person/jekan
Himangshu Kalita
Aerospace and Mechanical Engineering Department
University of Arizona
Tucson, AZ
USA
Himangshu Kalita received a Bachelor of Technology in Mechanical Engineering from the National Institute of Technology in Silchar, India in 2012. Upon graduating, he first worked as an Assistant Manager for Tata Motors, after which he took a Teaching and Research Assistant position at Arizona State University. He is currently pursuing his PhD in Mechanical Engineering at University of Arizona in the Space and Terrestrial Robotic Exploration (SpaceTREx) Laboratory. Mr Kalita’s research interests include dynamics and control, space robotics, machine learning and automated design.
CONTACT
E: hkalita@email.arizona.edu
W: https://www.linkedin.com/in/himangshukalita/
Dr Erik Asphaug
Department of Planetary Sciences
University of Arizona
Tucson, AZ
USA
Dr Erik Asphaug was awarded his PhD in Planetary Sciences from University of Arizona in 1993, after which he was a Postdoctoral Fellow at the NASA Ames Research Center. He then worked in several prestigious institutes, including the SETI Institute, the University of California – Santa Cruz, and Arizona State University, before starting his current role as Professor of the Lunar and Planetary Laboratory in the Department of Planetary Sciences of the University of Arizona. In addition to being a Principal Investigator of the SpaceTREx laboratory, Dr Asphaug is also on the science team of NASA’s Psyche mission, ESA’s Hera mission to Didymos, and JAXA’s MMX mission to the Martian moons.
CONTACT
E: asphaug@lpl.arizona.edu
W: https://www.lpl.arizona.edu/faculty/erik-asphaug
FUNDING
NASA
JPL
US Airforce
NSF
FURTHER READING
H Kalita, J Thangavelautham, Long term exploration of planetary pits, caves, and lava tubes, In International Symposium on Artificial Intelligence, Robotics and Automation in Space 2020.
H Kalita, J Thangavelautham, Mobility, Power and Thermal Control of Spherex for Planetary Exploration, In AAS Guidance and Control Conference 2020.
H Kalita, AS Gholap, J Thangavelautham, Dynamics and control of a hopping robot for extreme environment exploration on the Moon and Mars, In 2020 IEEE Aerospace Conference, 2020.
H Kalita, J Thangavelautham, Lunar cubesat lander to explore mare tranquilitatis pit, In AIAA Scitech 2020 Forum, p. 2163.
H Kalita, J Thangavelautham, Exploration of extreme environments with current and emerging robot systems, Current Robotics Reports, 2020, 15.
E Asphaug, J Thangavelautham, A Klesh, A Chandra, R Nallapu, L Raura, M Herreras-Martinez, S Schwartz, A cubesat centrifuge for long duration milligravity research, npj Microgravity, 2017, 3, 16.
REPUBLISH OUR ARTICLES
We encourage all formats of sharing and republishing of our articles. Whether you want to host on your website, publication or blog, we welcome this. Find out more
Creative Commons Licence (CC BY 4.0)
This work is licensed under a Creative Commons Attribution 4.0 International License. 
What does this mean?
Share: You can copy and redistribute the material in any medium or format
Adapt: You can change, and build upon the material for any purpose, even commercially.
Credit: You must give appropriate credit, provide a link to the license, and indicate if changes were made.
SUBSCRIBE NOW
Follow Us
MORE ARTICLES YOU MAY LIKE

Alex Spezowka | Responsible Research Writing in the Age of AI: From Detection to Transparency
Artificial intelligence is often discussed as a future challenge for research, yet it is already shaping how many papers are written. Drawing on emerging evidence and recent analysis, work led by Alex Spezowka highlights a key shift in thinking: rather than trying to detect AI use, the focus is moving towards how it can be used responsibly. This has important implications for how research is produced, evaluated, and trusted.

Distinguished Professor Michael Zhdanov | Mapping Magma and Drilling for Oil: New Methods for Geophysical Modelling
Geophysicists use a variety of different methods to peer beneath the Earth’s surface. Seismic activity, gravitational fields , and magnetic fields each offer their own windows into the world underground, but, in isolation, are incapable of giving us the full picture. Combining data from distinct geophysical surveys, however, is its own challenge. For a number of years, a team of researchers led by Professor Michael Zhdanov has worked to develop a mathematical framework capable of generating detailed geophysical models from multiphysics data.
Through application to modelling magma chambers underneath Yellowstone and searching for oil deposits in the Barents Sea, they demonstrate that their approach can produce robust and accurate predictions

Dr David Berry | Bridging the gap between Agriculture and Automation
As automation and controlled environments reshape modern farming, the need for technicians who understand both plant science and engineering is rapidly increasing. At Virginia Western Community College (VWCC) located in Roanoke, VA, Dr David Berry is leading a programme supported by the National Science Foundation (NSF) with the aim to merge agriculture with mechatronics, preparing students for the realities of emerging industries. A distinctive example of this approach is an automated hydroponics system designed by two industry-sponsored students, demonstrating how practical experience, interdisciplinary training and strong employer partnerships can create the skilled workforce required for the future of sustainable food production.

Dr Kenric Nelson | Modelling the Extreme: A New Technique for Training Risk-Aware Artificial Intelligence
Category 5 hurricanes, financial crashes, and global pandemics are just a few examples of rare events whose high risks necessitate understanding and mitigation. Developments in artificial intelligence (AI) could go a long way towards improving our ability to model and mitigate the impacts of such extreme events, but current training methods are often unable to deal effectively with outliers in data – which is exactly what extreme events are. If outliers are present in training data, they skew the AI’s expectations, but if they’re omitted entirely, models will wrongly assume they never occur. To address this shortcoming, the Photrek team, led by Dr Kenric Nelson, has developed a new training technique to design more robust AI systems that can cope with rare, extreme events.